As mentioned in the previous post, scalar control is a way of controlling induction motor speed by varying its frequency while keeping the U/f ratio constant. Well, in major cases it is true, but only to some extent. You know already that voltage on the lower region of characteristic needs to be boosted to run the motor on lower frequencies. But what happens on another side of the curve? What happens above nominal frequency and what is VFD 87Hz characteristic? Reply to all this question You can find in this article!

What happens above the nominal frequency of VFD?
Let’s say you are just commissioning a newly installed pump driven by VFD. To ensure required flow in the certain loop, you checked all connections, configuration of motors windings, parameters of the VFD, and direction of rotation. Now you are ready to go, but after pressing the start button, you realized that you are off from desired flow. As the centrifugal pump flow increase with the speed of rotation, you could turn up the motor speed, but is it a good or safe idea to increase motor speed above its rated value?
Field Wakening Range
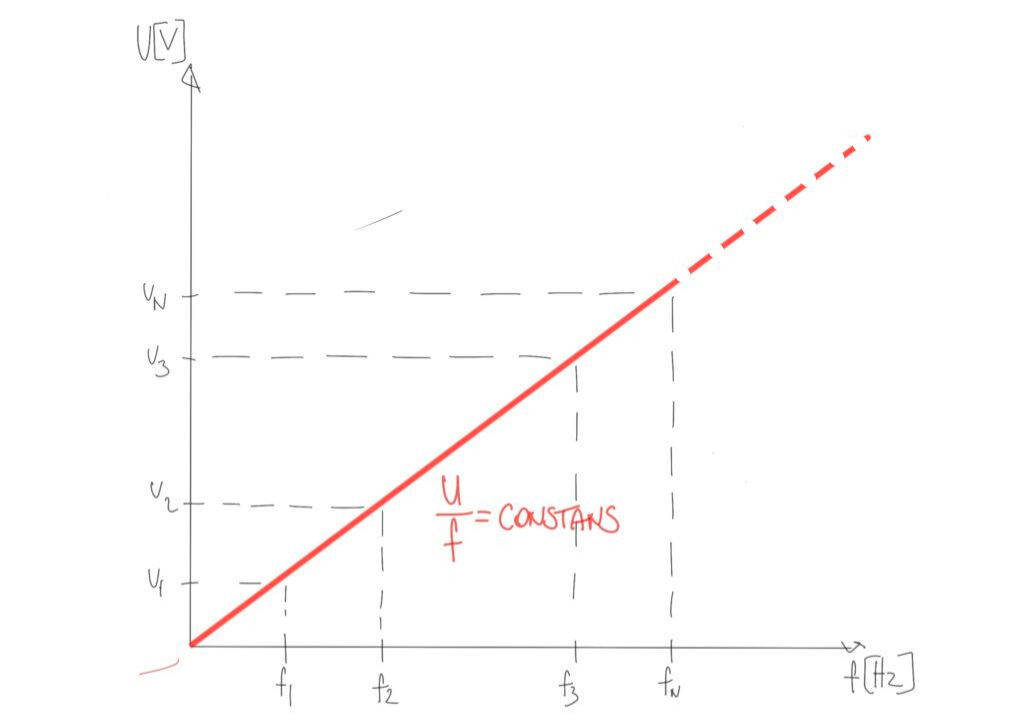
We all remember from the previous article that keeping the U/f ratio constant will guarantee constant motor torque from Umin/fmin up to UN/fN point.

Every time we increase frequency, we are increasing the voltage to keep the ratio constant. Let’s take a look at the hypothetical 400V/50Hz induction motor.

Which grants us the U/f ratio of:

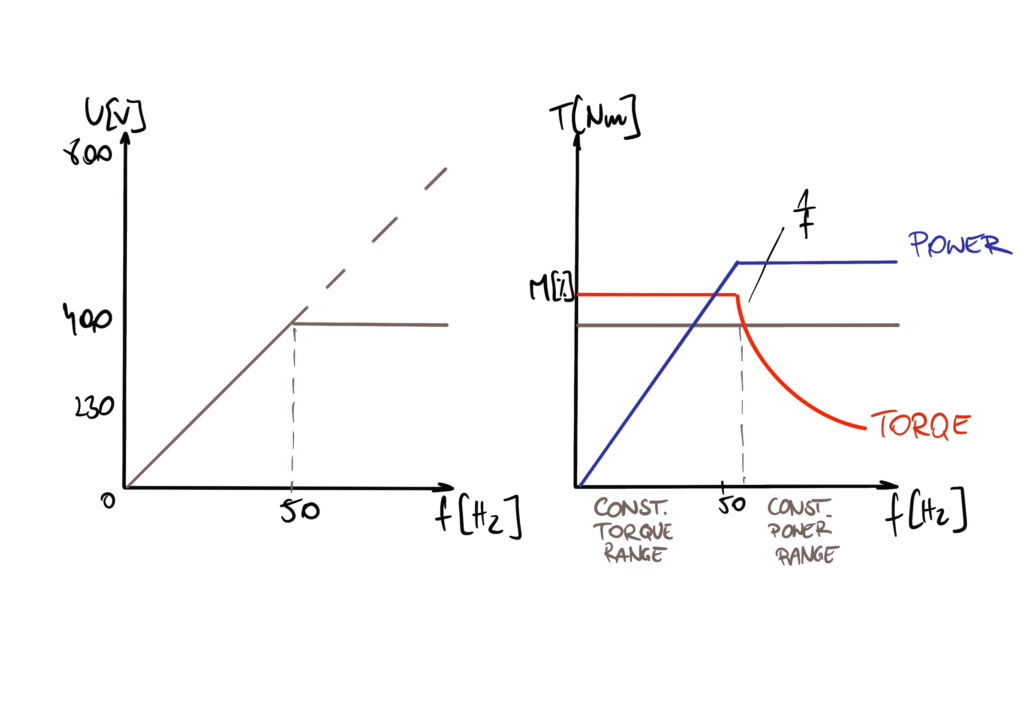
Above the nominal parameters point, we can still increase drive frequency, but we have no measures of increasing the voltage any higher. Supply voltage and insulation of the windings are limiting us to what we have. Increasing of frequency to let’s say 80Hz will result in a ratio of:
Because the ratio decreased, flux will decrease as well. The outcome will be decreased torque. We just entered the range called field weakening range. In this range, because of the lack of possibility of increasing a voltage to keep the ratio constant, motor torque is decreasing with 1/f manner.
What does that mean for our motor? Although it is rotating faster, it may have not enough force to counter the load torque and motor may stall. Even if torque is reduced, power is still remaining the same.
Is it worth then, operating the motor in field weakening range? You may get extra flow on your SW pump for example, but You need to take into account mechanical constrains of your system – increased needs for lubrication, danger of reaching maximum mechanical speed tolerated, shortening bearings lifetime. After all there are no economic savings on consumed power. Also motor operated above it rated frequency will be heating more due to increased losses in iron.
A practical example for VFD 87Hz Characteristic
87Hz characteristic, which is the main subject of this post is not so common. However, a very good example, when this solution can be handy is the cooling system. If the cooling system was modified, and new consumers were added to the circuit, the heat exchange rate is changed. Now You have 2 options, buy a new pump with a new motor ( if the heat balance is really far away) or if the change is not bigger than 20% You can easily use VFD and 87Hz characteristics to solve this problem! But everything steps by step.

VFD 87Hz CHARACTERISTIC
87Hz characteristic does sound intriguing, doesn’t it? It’s the way of increasing your drive’s available torque and power, by extending its operation range and keeping a constant U/f ratio above nominal frequency. Again, it has few limitations.
Let’s look again on our motor nameplate.
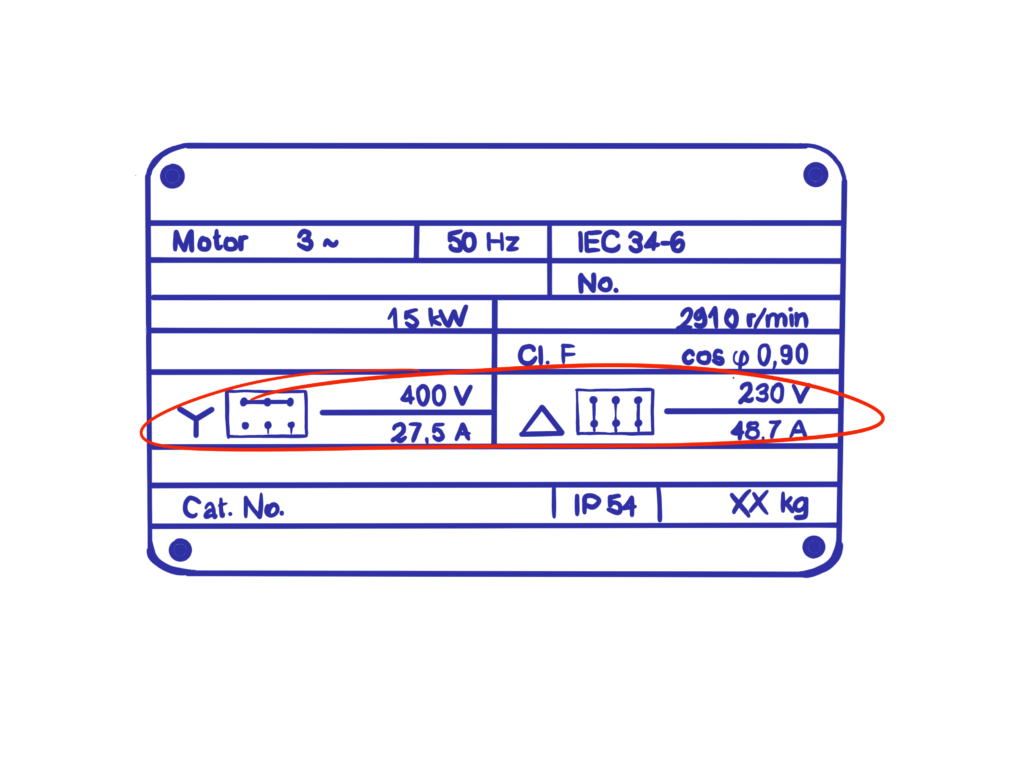
We can see, that we have 2 possibilities of powering our motor.
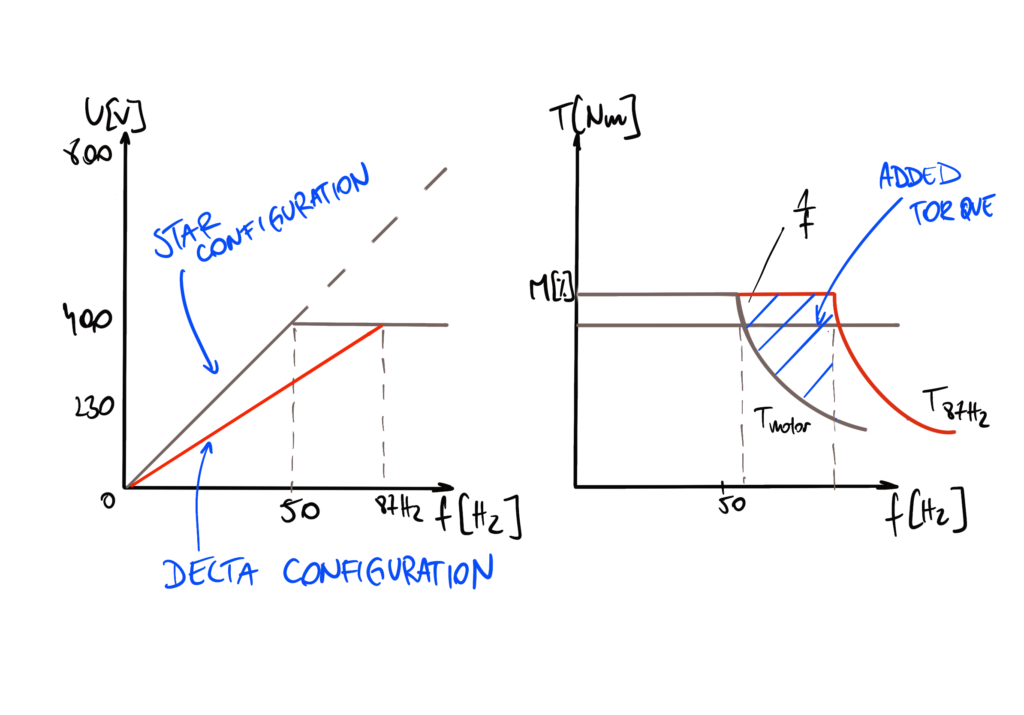
- Supply with 400V and current draw of 27,5 amps, when the connection is STAR (WYE) or
- Supply with 230V and current draw of 48,7 amps, when the connection is DELTA
Both of this configurations will result in motor consuming power of:

Which we can assume is almost the same and that give as almost the same torque in both configurations.
Use of 87Hz technique is allowing us to connect motor in DELTA while powering it from 400V supply.
That means that all motor parameters must be multiplied by √3. Instead of DELTA (230V / 50Hz), we have DELTA (400V / 87Hz) thus we are extending the constant torque range of the motor, as we are able to operate the motor on a constant U/f ratio up to 400/87Hz not only 230/50Hz.
Nothing comes without a price. This configuration will cause motor to consume the power of:

NOTE: Operating motor without setting 87Hz as nominal frequency in drive will damage the motor.
There are also again some another important considerations:
- Motor windings must be able withstand higher voltage. With motor 440V STAR / 230V DELTA, the windings are ready to operate on 400V AC.
- As we operate on higher speed, mechanical constrains of system must be observed again – increased needs of lubrication, shorter bearings life, mechanical speed limits.
- Operation on higher than nominal frequencies is causing motor to heating more due to increased losses in iron.
- Due to higher current draw, motor of course will be heating more. Not all motors suits 87Hz operation.
What are the benefits then?
- An AC drive can be operated with a greater speed control range.
- A lower-power rating motor can be used. A lower moment of inertia will allow us for tighter dynamic control.
So is it worth operating the existing AC drive on 87Hz characteristic? If you are required to operate your application on speeds higher than nominal – maybe, yes if reduction of the load is possible. Practically 87Hz characteristic may make sense only for motors up to 45kW.
Let’s answer the question we raised on beginning of this article:
Conclusion about VFD 87Hz Characteristic
As long as all limitations are considered and all additional requirements are fulfilled, it may be safe to operate motor above its rated frequency, but if it is profitable it must be judged individually based on the application. In example the working point of variable torque load (i.e. pump or fun) driven by 4-pole motor in the field weakening region may prove less current consumption that the same load driven by 2-pole motor with operation point set below nominal frequency.

Do You like our posts? Subscribe vessel automation newsletter!
[…] three articles, we did a short introduction on what VFDs are, we discussed Scalar Control and 87 Hz characteristic, so this time we will take a look into Vector […]
dear sir
Thanks Karimi! All the pleasure on our side!